Фотограмметрическая обработка снимков ADS 40 в системе PHOTOMOD
С точки зрения пользователя системы PHOTOMOD, работа с проектом снимков ADS 40 практически не отличается от обработки блока аэрофотоснимков или сканерных космических изображений
П.С. Титаров ( «Ракурс»)
Сенсор ADS 40 и особенности получаемых им снимков
Цифровой сенсор ADS 40 (Airborne Digital Sensor) компании Leica Geosystems (Швейцария) представляет собой сканерную съемочную систему, устанавливаемую на авиационные носители.
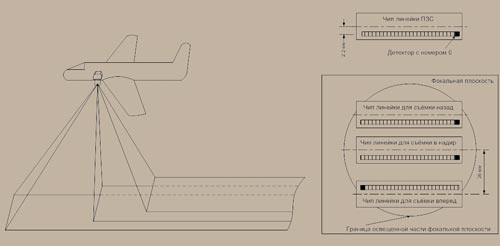
В фокальной плоскости сенсора расположено несколько линеек детекторов, позволяющих проводить одновременную съемку в различных спектральных диапазонах, под разными углами отклонения от надира по тангажу, а также вдвое повышать пространственное разрешение путем комбинирования снимков, полученных линейками, установленными со смещением на половину размера детектора относительно друг друга. В зависимости от высоты полета и режима съемки (одинарными или сдвоенными линейками) пространственное разрешение снимков может составлять от 5 см до 1 м. Каждая линейка содержит 12 тыс. детекторов. Фокусное расстояние оптической системы составляет примерно 62,5 мм, ширина поля зрения 64 .
С точки зрения извлечения метрической информации, необходимой для создания выходных фотограмметрических продуктов, таких как цифровые модели рельефа (ЦМР) и ортоизображения, целесообразно рассматривать в первую очередь линейки детекторов, предназначенные для панхроматической съемки в направлении надира, а также вдоль направления полета вперед и назад. Конфигурация фокальной плоскости может различаться в зависимости от используемой камеры, но в базовом варианте угол отклонения от надира вперед составляет 28 , назад 14 . Съемка такого триплета и расположение соответствующих линеек детекторов (для упрощения они показаны одинарными) в фокальной плоскости сенсора изображены на рис. 1.
Рис. 1. Съемка панхроматического триплета и расположение панхроматических линеек в фокальной плоскости
Таким образом, в отличие от снимков, получаемых аэрофотоаппаратами, результаты съемки представляют собой протяженные панхроматические триплеты и мультиспектральные изображения; ширина растра определяется числом детекторов линейки или сдвоенных линеек, а число строк может достигать сотен тысяч.
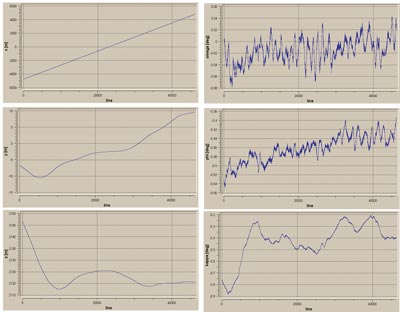
Вследствие того, что ADS 40 является сканерной съемочной системой, геометрия получаемых изображений существенно отличается от центральной проекции; каждая строка снимка имеет собственные элементы внешнего ориентирования (ЭВО), поэтому к этим снимкам неприменимы методы классической фотограмметрии. Более того, возникают проблемы и при использовании методов обработки сканерных космических снимков, так как перемещение центра масс и изменение ориентации спутников происходят плавно и предсказуемо, чего нельзя сказать о сенсоре, установленном на авиационной платформе. На рис. 2 показаны графики изменения ЭВО сенсора ADS 40, построенные с помощью утилиты ADSOriPlot компании Leica Geosystems. Характер изменения ЭВО, особенно угловых, существенно ограничивает возможности их интерполирования.
Рис. 2. Изменение элементов внешнего ориентирования строк снимка
Вследствие указанного характера изменения ЭВО геометрически не преобразованные снимки (в терминологии компании Leica Geosystems изображения уровня Level 0) содержат существенные геометрические искажения (рис. 3, слева). Поэтому перед выполнением фотограмметрических процессов изображения Level 0 преобразуются в так называемые изображения уровня Level 1, лишенные упомянутых недостатков (рис. 3, справа), для чего предназначено программное обеспечение GPro, которое входит в комплект поставки съемочного комплекса ADS 40.
Рис. 3. Изображения Level 0 (слева) и Level 1 (справа)
Создание изображений Level 1 заключается в проектировании снимков уровня Level 0 на некоторую плоскость постоянной высоты, называемую плоскостью ректификации (рис. 4); при этом используются ЭВО, измеренные в полете с помощью системы спутникового позиционирования и инерциальной системы.
Плоскость ректификации представляет собой плоскость постоянной высоты (Z=const) в так называемой системе координат LSR (Local Space Rectangular), которая представляет собой правую топоцентрическую горизонтную систему координат с началом отсчета, расположенным приблизительно в центре отснятого участка; координаты начала отсчета включаются в состав метаданных снимка.
Рис. 4. Создание изображения Level 1
Координаты X, Y (в системе координат LSR) проекции точки местности на плоскость ректификации аффинно связаны с пиксельными координатами этой точки на изображении Level 1.
Предварительная обработка данных ADS 40
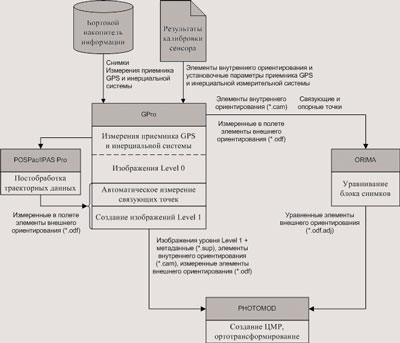
Построение выходных фотограмметрических продуктов, таких как ЦМР и ортоизображения, может проводиться в цифровой фотограмметрической системе PHOTOMOD, разработанной компанией «Ракурс», однако перед этим необходимо выполнить предварительную обработку снимков ADS 40.
После аэросъемочного залета снимки и траекторные данные подвергаются первичной обработке: программой GPro при переносе данных из бортового накопителя информации на рабочие станции создаются изображения Level 0, с помощью специализированного программного обеспечения (в зависимости от модификации сенсора это может быть POSPac компании Applanix или IPAS Pro компании Leica Geosystems) выполняется постобработка измерений системы спутникового позиционирования и инерциальной системы, а затем создаются изображения Level 1.
Далее выполняется автоматическое измерение связующих точек и ориентирование блока снимков с привлечением опорных точек или без них. Ориентирование блока снимков ADS 40 рекомендуется выполнять с помощью соответствующей версии программы ORIMA (L. Hinsken), также входящей в комплект поставки съемочного комплекса (рис. 5).
Рис. 5. Предварительная обработка данных ADS 40
Таким образом, для фотограмметрической обработки в систему PHOTOMOD передаются изображения Level 1, уравненные программой ORIMA и измеренные в полете ЭВО, элементы внутреннего ориентирования, а также метаданные (которые содержат, в частности, координаты начала отсчета системы координат LSR и параметры связи координат на плоскости ректификации с координатами на изображении Level 1).
Элементы внутреннего ориентирования включают в себя фокусное расстояние оптической системы, а также координаты каждого детектора в фокальной плоскости сенсора.
Каждый набор элементов внешнего ориентирования (измеренных и уравненных) содержит три линейных и три угловых ЭВО для каждой строки изображения Level 0, заданных относительно системы координат LSR.
Фотограмметрическая обработка снимков ADS 40 в системе PHOTOMOD
С точки зрения программной реализации, основой фотограмметрической обработки является решение прямой и обратной фотограмметрических засечек.
Задачу прямой фотограмметрической засечки можно сформулировать следующим образом: по заданным координатам l1, p1 и l2, p2 изображений некоторой точки M местности на снимках стереопары необходимо вычислить координаты X, Y, Z точки M на местности. Прямая фотограмметрическая засечка решается, например, при создании ЦМР.
Решение обратной фотограмметрической засечки заключается в следующем: по заданным координатам X, Y, Z некоторой точки M в системе координат местности необходимо вычислить координаты l, p ее изображения на снимке. Обратная фотограмметрическая засечка решается при выполнении ортотрансформирования снимков.
При решении фотограмметрических засечек по снимкам ADS 40 необходимо учитывать следующие обстоятельства. Во-первых, в проект вводятся снимки уровня Level 1, которые являются геометрически преобразованными. Для использования элементов внешнего и внутреннего ориентирования при решении засечек необходимо осуществлять пересчеты между координатами точки на изображениях уровней Level 0 и Level 1. Во-вторых, изображения уровня Level 1 создаются без учета результатов уравнивания, поэтому воспроизведение тех пересчетов, которые выполнялись при создании изображений уровня Level 1, должно проводиться с использованием неуравненных ЭВО, в то время как все остальные расчеты должны быть основаны на уравненных элементах ориентирования. И, в-третьих, ЭВО заданы в системе координат LSR, поэтому необходимы также пересчеты между этой системой координат и системой координат проекта PHOTOMOD.
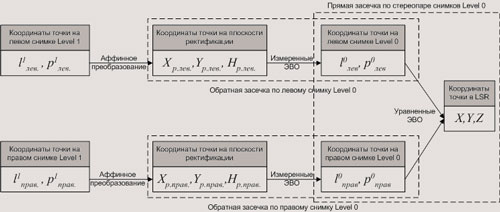
Таким образом, решение прямой фотограмметрической засечки проводится в соответствии со схемой, приведенной на рис. 6.
Рис. 6. Схема решения прямой засечки по стереопаре снимков ADS 40 уровня Level 1
Первый из пересчетов выполняется в соответствии с простыми соотношениями связи координат на плоскости ректификации и на изображении уровня Level 1.
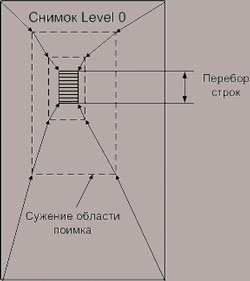
Второй пересчет представляет собой процесс поиска координат точки изображения уровня Level 0, которая проектируется в заданную точку плоскости ректификации. По сути, это решение обратной засечки по изображению Level 0. Процесс включает в себя этап итерационного сужения диапазона строк изображения Level 0, который заведомо содержит искомую строку, и последующий этап переборного поиска в этом диапазоне (рис. 7). Последний этап необходим, так как пространственное и угловое положение сенсора на авиационном носителе может резко меняться на временных промежутках, сравнимых с периодом сканирования, вплоть до возникновения перехлестов строк. Этот пересчет выполняется с использованием неуравненных элементов внешнего ориентирования.
Рис. 7. Поиск строки изображения Level 0, соответствующей точке местности
Третий пересчет, в результате которого вычисляются искомые координаты точки в системе координат LSR, заключается в поиске точки пересечения лучей, соответствующих найденным точкам на левом и правом изображениях уровня Level 0. Каждый луч задается вершиной (которая соответствует центру проекции строки) и единичным направляющим вектором, который определяется по угловым элементам внешнего ориентирования. Лучи строятся по уравненным элементам внешнего ориентирования.
Решение обратной фотограмметрической засечки выполняется в соответствии со схемой, приведенной на рис. 8.
Рис 8. Схема решения обратной засечки по снимку ADS 40 уровня Level 1
Первый пересчет решение обратной засечки по снимку Level 0 выполняется также, как переход от точки плоскости ректификации к координатам ее изображения на снимке уровня Level 0, но с использованием уравненных элементов внешнего ориентирования.
Второй пересчет координат представляет собой проектирование заданной точки изображения уровня Level 0 на плоскость ректификации. Для этого по неуравненным элементам внешнего ориентирования вычисляются координаты вершины и компоненты направляющего вектора луча, соответствующего данной точке изображения Level 0, затем строится точка пересечения луча с плоскостью ректификации.
Третий пересчет выполняется с использованием аффинных соотношений, связывающих координаты плоскости ректификации с координатами на изображении уровня Level 1.
Выше под координатами точки местности подразумевались ее координаты в системе LSR. Связь между системами координат проекта PHOTOMOD и LSR обеспечивается заданием параметров системы координат проекта (датум, параметры картографической проекции и т. д.) либо, при использовании в проекте PHOTOMOD условной декартовой системы координат (произвольным образом расположенной в пространстве), заданием как минимум трех опорных точек на стереопару для вычисления параметров преобразования поворот масштаб сдвиг между системами.
Практические аспекты обработки ADS 40 в системе PHOTOMOD
С точки зрения пользователя системы PHOTOMOD, работа с проектом снимков ADS 40 практически не отличается от обработки блока аэрофотоснимков или сканерных космических изображений.
Полный цикл фотограмметрической обработки снимков ADS 40 включает в себя создание проекта (модуль PHOTOMOD Montage Desktop), измерение точек съемочного обоснования и связующих точек (PHOTOMOD AT), создание ЦМР по стереопарам (PHOTOMOD DTM), векторизацию в стереорежиме (PHOTOMOD StereoDraw), построение ортоизображений (PHOTOMOD Mosaic), создание цифровых карт (PHOTOMOD VectOr).
В отличие от традиционной технологической схемы работы с PHOTOMOD при обработке ADS 40 отсутствует этап уравнивания (ориентирования снимков), так как этот процесс выполняется заранее программой ORIMA. Другие особенности обработки ADS 40 в PHOTOMOD рассмотрены ниже.
При съемке сенсором ADS 40 получается целый набор растровых изображений, и перед добавлением снимков в проект необходимо выбрать, какие из них целесообразно использовать. Выбор снимков для построения ортоизображения определяется тем, должно оно быть панхроматическим или мультиспектральным. Для построения панхроматического ортоизображения предпочтительнее использовать снимки, полученные при съемке в надир, что позволит минимизировать влияние погрешностей модели рельефа на точность ортофотоплана. Ответ на вопрос о выборе снимков для построения модели рельефа не столь однозначен. Из трех снимков, полученных под разными углами тангажа (+28, 0, 14 ), можно составить три стереопары с разным отношением базиса съемки к высоте. Так, стереопара, включающая снимки под углами +28 и 14 , обеспечивает наибольшее отношение базиса к высоте и является предпочтительной с точки зрения точности решения прямой засечки; с другой стороны, эти изображения сильно отличаются друг от друга, что ухудшает надежность работы процедур автоматического сопоставления точек. Обратная ситуация складывается для стереопары из снимков, полученных под углами 0 и 14 . По-видимому, выбор целесообразно осуществлять на основе мнения операторов, которым предстоит работать с проектом, о точности и комфортности наведения по различным стереопарам при использовании имеющегося программного и аппаратного обеспечения.
Так как ориентирование снимков ADS 40 в системе PHOTOMOD не проводится, а система обладает широкими возможностями по работе с данными из других проектов, нет смысла добавлять все снимки ADS 40 в один проект. Достаточно поместить в проект снимки, составляющие стереопару, а если стереопара не содержит снимок, предназначенный для ортотрансформирования (панхроматический надирный или мультиспектральный), его следует добавить в отдельный маршрут проекта.
Необходимо иметь в виду, что помимо растровых изображений в проект вводятся дополнительные данные (элементы внутреннего и внешнего ориентирования и другие метаданные); эти данные расположены в разных файлах, которые ссылаются друг на друга по абсолютным именам. Процедура сбора данных автоматизирована: при добавлении снимка пользователю достаточно выбрать каталог, в котором находятся файлы метаданных с расширением .sup для изображений уровня Level 1. Для гарантированного нахождения файлов необходимо, чтобы структура каталогов, созданная на этапе предварительной обработки снимков, оставалась неизменной. Допустимо перемещение только файлов с расширением .sup для снимков Level 1, с которых начинается анализ.
После добавления снимков в проект необходимо в модуле PHOTOMOD AT измерить точки съемочного обоснования и связующие точки. При работе с ADS 40 точки с известными геодезическими координатами используются как контрольные (для проверки результатов предварительной обработки и корректности создания проекта PHOTOMOD), а при работе в условной системе координат для установления связи между ней и LSR. Эта проверка осуществляется вместо процедуры уравнивания. Связующие точки используются для построения эпиполярно трансформированных изображений.
Дальнейшая работа с проектом в модулях PHOTOMOD DTM, StereoDraw, Mosaic и VectOr выполняется обычным образом с учетом возможного размещения снимков блока в различных проектах.
Апробация технологии на производственном проекте
По заказу ФГУП «Госземкадастрсъемка» ВИСХАГИ компанией «Ракурс» был выполнен проект по построению ортофотопланов масштаба 1:2000 по снимкам ADS 40 на населенные пункты одного из административных районов Московской области. Проект включал в себя 24 маршрута (24 набора снимков, полученных одновременно), по которым был создан 351 лист выходных ортофотопланов.
В соответствие с рекомендациями разработчиков сенсора ADS 40, съемка проводилась с пространственным разрешением 20 см. После оценки вариантов стереопар из соображений комфортности стереонаблюдения операторами были выбраны стереопары, составленные снимками с углами отклонения от надира 0 и 14 . Каждая стереопара была помещена в отдельный проект PHOTOMOD.
Контроль точности ориентирования снимков проводился по 15 контрольным точкам; среднеквадратическая ошибка плановых координат составила около 20 см, высот 30 см.
Так как для построения ЦМР использовались стереопары с наименьшим отношением базиса съемки к высоте, работы в модуле PHOTOMOD DTM проводились с двукратным увеличением. ЦМР строились путем набора векторов и пикетов вручную по каждой стереопаре с последующим объединением наборов объектов, созданных в разных проектах PHOTOMOD, если картографируемый населенный пункт изобразился на нескольких стереопарах. Затем по набору объектов строилась модель рельефа в виде TIN (Triangulated Irregular Network), а по ней, в свою очередь, создавались матрицы высот с размером ячейки 2 м.
Построение ортофотопланов провоилось по надирным снимкам с использованием возможности модуля PHOTOMOD Mosaic создавать ортомозаики по данным из нескольких проектов PHOTOMOD.
Ортофотопланы были переданы заказчику и успешно прошли приемку в отделе технического контроля.
См. также: Каталог Программного обеспечения: - PHOTOMOD Каталог Организаций: - Ракурс Каталог Авторов: - Титаров П.С.





 Цифровой сенсор ADS 40 (Airborne Digital Sensor) компании Leica Geosystems (Швейцария) представляет собой сканерную съемочную систему, устанавливаемую на авиационные носители.
Цифровой сенсор ADS 40 (Airborne Digital Sensor) компании Leica Geosystems (Швейцария) представляет собой сканерную съемочную систему, устанавливаемую на авиационные носители.