Некоторые аспекты использования современных цифровых фотограмметрических
А.Ю. Сечин (Фирма «Ракурс»)
В настоящее время фотограмметрическая обработка снимков проводится на цифровых фотограмметрических станциях (ЦФС). Одним из необходимых этапов является сканирование пленки, что часто приводит к снижению точности и качества информации. Сохранить качество можно, если использовать данные, полученные с цифровых фотограмметрических камер, которые все чаще находят применение в фотограмметрическом производстве. Многие организации и частные компании стали владельцами таких камер. Не ставя целью проведение сравнительного анализа различных моделей камер, обратим внимание читателей на некоторые их характеристики и особенности использования. В статье рассматриваются те камеры, с данными которых автору приходилось работать. Ничем иным выбор исследуемых образцов не обусловлен.
В качестве «эталона» при рассмотрении современных цифровых камер будем использовать широко распространенную аналоговую камеру Leica RC-30 (Leica Geosystems, Швейцария). Камера RC-30 может быть использована с объективами, имеющими фокусное расстояние 150 или 300 мм; размер ее кадра составляет 230x230 мм, что при сканировании с типичным разрешением 15 мкм дает цифровое изображение размером 15 000x15 000 пикселей.
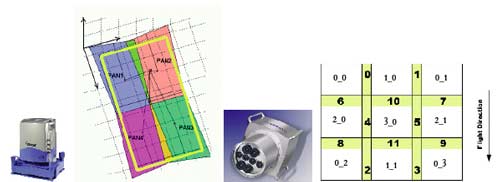
Рис. 1. Получение виртуального изображения в камерах DMC (а) и UltraСam (б)
Технология производства цифровых светочувствительных матриц (CMOS или CCD) пока не позволяет выпускать такие габаритные матрицы. Поэтому при изготовлении цифровых аэросъемочных камер используют матрицы небольших размеров (среднеформатные камеры) или специальные приемы по объединению кадров, полученных разными матрицами (крупноформатные камеры). Следует отметить, что производители лидирующих крупноформатных камер — UltraСam D, UltraСam X (Microsoft Corp., США) и DMC (Intergraph Z/I Imaging, США) — используют разные подходы для «составления» цифрового изображения большого размера. В камерах UltraCam исходные снимки получают разными объективами, но съемка синхронизируется таким образом, что центры проекций этих снимков (положение объективов) совпадают. Четыре снимка, из которых «сшивается» изображение в камере DMC, имеют небольшое перекрытие и формируются в один момент времени (синхронизация с точностью 0,01 мс), но центры проекций у них разные. С точки зрения фотограмметрии, подход к комбинированию снимков в камере UltraСam является более «честным» и точным. Несовпадение центров фотографирования вносит систематическую ошибку в итоговое изображение камеры DMC (рис. 1), величина которой зависит от высоты съемки [1]. Тем не менее, исследования [2] показывают, что точность результатов, обеспечиваемая этими камерами, практически одинакова.
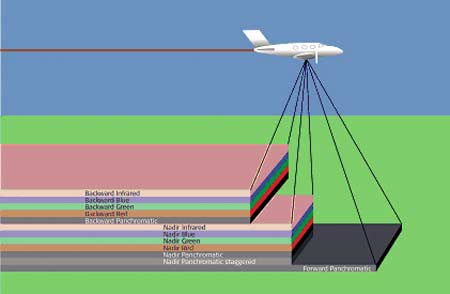
Еще одним способом получения цифровых изображений большого размера является использование светочувствительной линейки, которая, перемещаясь вместе с самолетом, формирует цифровой «ковер» произвольной длины. Этот способ, применяющийся при съемке с космических спутников, теперь реализован и в аэрофотосъемке. Наиболее известными камерами с таким подходом к получению изображения являются ADS 40 и ADS 80 (Leica Geosystems). Геометрия их снимков непривычна для фотограмметристов и сильно отличается от геометрии снимков кадровых систем (рис. 2). В отличие от спутниковых изображений, когда траектория движения аппарата не подвержена колебаниям, изображения ADS 40 и ADS 80 требуют дополнительной коррекции из-за вибрации и возмущений в движении носителя. Эта коррекция — уравнивание «ковров» снимков и преобразование изображений Level 0 в Level 1 — проводится с помощью программ, поставляемых с камерой.
Рис. 2. Схема получения изображений камерой ADS 80
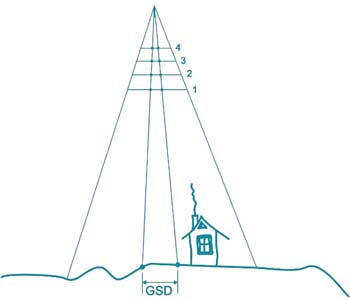
Пользователи аналоговых камер привыкли к термину «масштаб съемки» и часто используют его для характеристики съемки цифровыми камерами. Съемка камерами типа RC-30 проводится на лавсановую пленку с размером кадра 23х23 см. Под масштабом съемки при этом понимают соотношение размера изображения объекта на пленке и реального его размера. Применение понятия «масштаб съемки» к снимкам, полученным цифровыми камерами, на наш взгляд, совершенно неверно. Для космических цифровых снимков используется понятие «размер пикселя» на местности (в англоязычной литературе — ground sample distance, GSD). Это понятие следует использовать и для цифровых камер. Рассмотрим варианты съемки, приведенные на рис. 3, где 1 — съемка аналоговой камерой с размером кадра 23x23 см; 2 — съемка аналоговой камерой с размером кадра 18x18 см; 3, 4 — съемка разными цифровыми камерами.
Рис. 3. Иллюстрация применения размера пикселя вместо масштаба съемки
Как видно из рис. 3, все изображения одинаковы. Если же рассчитать масштаб съемки, то он разный для всех камер. Отметим, что понятие GSD (размер пикселя на местности), которым мы будем пользоваться, для аналоговых камер зависит от разрешения сканирования. При его использовании в дальнейшем будем считать, что сканирование пленки аналоговой камеры проведено с разрешением 15 мкм.
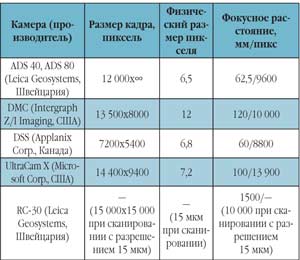
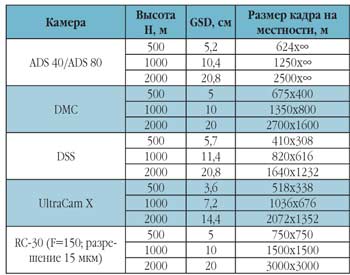
В табл. 1 приведены основные характеристики рассматриваемых камер.
Таблица 1. Характеристики камер
Если в паспорте цифровой камеры не указано фокусное расстояние в пикселях, его легко рассчитать, разделив фокусное расстояние в миллиметрах на физический размер пикселя матрицы камеры. При работе в ЦФС со снимками, полученными цифровой камерой, вполне естественно измерять все величины в пикселях. Физический размер пикселя матрицы определяет ее светочувствительность. Чем больше размер ячейки, тем больше фотонов попадает на матрицу (при использовании одного объектива), что позволяет проводить съемку с меньшими выдержками или при худшем освещении.
Величина GSD, которая в конечном итоге определяет точность результатов дальнейшей обработки, вычисляется по формуле:
GSD = H/F,
где высота H измеряется в сантиметрах, а фокусное расстояние F в пикселях.
Для сравнения приведем значения GSD и размеры кадра на местности при съемке с разных высот (табл. 2).
Таблица 2. Значения GSD для различных камер
Как видно из табл. 2, параметры снимков современных цифровых камер приближаются к параметрам снимков аналоговых камер, но пока еще не достигли их.
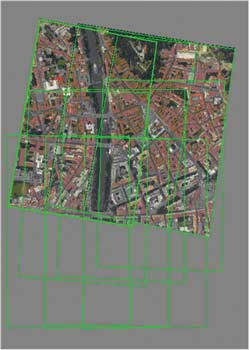
Кадры цифровых камер имеют прямоугольную форму. Вообще говоря, цифровые камеры на носителе (самолете) можно монтировать различным образом. Для обеспечения большего захвата при маршрутной съемке или для экономии горючего при площадной съемке цифровые камеры монтируются так, чтобы большая сторона кадра располагалась поперек движения носителя (рис. 4).
Рис. 4. Ориентация кадра большей стороной поперек оси маршрута
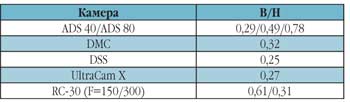
Величина GSD определяет порядок точности результатов в плане, реальная точность может быть несколько лучше при использовании маркированных точек и автоматических процедур измерения и хуже при наличии систематических ошибок, плохой калибровке камеры. Для получения точности результатов по высоте следует разделить величину GSD на B/H — отношение базиса съемки к ее высоте. Так как для уравнивания блока снимков требуется перекрытие 60%, то B/H легко рассчитать (табл. 3).
Таблица 3. Отношение базиса съемки к высоте для различных камер
Значение B/H для камер ADS 40/ADS 80 определяется выбором варианта формирования стереопар (назад-надир, надир-вперед или назад-вперед). Как видно из табл. 3, B/H для большинства цифровых камер близко к значению для камеры RC-30 с длиннофокусным объективом. В случае использования автоматических измерений (коррелятора) точность измерений по высоте будет определяться формулой:
dZ = c ( GSD/(B/H),
где c — «качество» снимка. По косвенным признакам (ошибки взаимного ориентирования, точность свободных триангуляционных моделей) для некоторых цифровых камер величина с может доходить до 0,1.
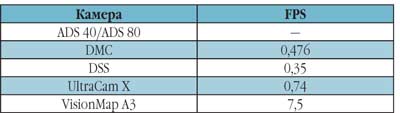
Одной из паспортных характеристик цифровых камер является число кадров в секунду — FPS. Максимальные значения FPS для разных камер приведены в табл. 4.
Таблица 4. Значения FPS для цифровых камер
Последней позицией в табл. 4 указана камера VisionMap A3 (VisionMap Ltd., Израиль), обладающая уникальным числом кадров в секунду [3]. Значение FPS ограничивает минимальную высоту съемки (минимальное значение GSD). Дело в том, что самолет, на котором установлена камера, не может иметь скорость меньше определенной. Для фотограмметрической обработки блока аэросъемки требуется перекрытие соседних снимков в маршруте не менее 60%. Поэтому скорость самолета V, высота H и FPS связаны формулой:
V = H ( FPS ( 0,4 ( (S/F) = 0,4 ( FPS ( S ( GSD,
где S — размер кадра в пикселях вдоль оси полета (как правило, меньшая сторона кадра).
Рис. 5. Матрица Брайса Э. Байера (Bryce Bayer)
Обычно скорость самолета не может быть ниже 100 узлов (200 км/ч). Таким образом, камера DMS не может обеспечить разрешение лучше 3 см. Для камер со светочувствительной линейкой ограничением для GSD служит скорость сброса данных электронными носителями. Для первых камер ADS 40 цветные снимки можно было получать с GSD не лучше 15 см. В последних камерах ADS 80 GSD составляет 5 см. Ограничение, налагаемое скоростью, может быть существенным для проведения съемки с помощью обычных (мало- и среднеформатных) камер на высотах 50–100 м с беспилотных летательных аппаратов.
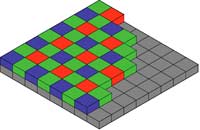
Важной характеристикой цифровой съемки является ее качество. Многие современные цифровые камеры позволяют получать снимки с глубиной цвета более 8 бит на канал, что дает возможность рассмотреть детали в тенях, недоступные при аналоговой съемке. Некоторые камеры могут получать снимки в инфракрасном (ближнем и дальнем) диапазоне. Рассмотрим подробнее получение цветных изображений цифровыми камерами. В простейшем случае (камеры малого и среднего форматов) цветное изображение формируется прямо во время съемки с помощью так называемой байеровской матрицы [4]. Светочувствительная матрица содержит по 25% красных и синих элементов и 50% зеленых элементов (рис. 5).
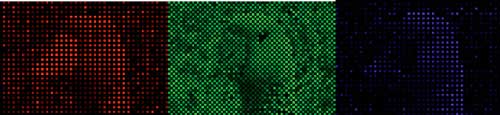
Рис. 6. Цветные составляющие изображения
Рис. 7. Комбинированное изображение
Рис. 8. Результат дебайеризации
Для получения цветного изображения (дебайеризация) применяются алгоритмы, использующие специальную интерполяцию и фильтры повышения четкости. На рис. 6 показаны цветные составляющие изображения, на рис. 7 и 8 соответственно комбинированное изображение и результат дебайеризации, к которому в конце обработки применяют искусственное повышение четкости.
С точки зрения фотограмметрической точности эффект такой обработки изучен мало, но при использовании площадных корреляторов, скорее всего, не приведет к ее снижению.
Камеры ADS 40 и ADS 80 используют другой подход к формированию цветного изображения. За специальным объективом расположены линейки с одинаковым разрешением (12 тыс. пикселей), чувствительные к разным диапазонам (R, G, B, IR, GrayScale). При этом в ADS 80 за счет использования тетрахроидной оптики не нужна дополнительная обработка при совмещении каналов для получения полноценного цветного изображения (в ADS 40 может потребоваться предварительное ортотрансформирование).
Для снижения стоимости производители камер UltraСam и DMC кроме черно-белых матриц с высоким разрешением устанавливают цветные матрицы с более низким разрешением. Для получения цветного изображения с высоким разрешением в этом случает необходимо использовать алгоритм паншарпенинга (pan-sharpening, рис. 9).
Рис. 9. Применение паншарпенинга
В камере DMC на один цветной пиксель приходится 22 черно-белых, в UltraСam — 9; для камер ADS паншарпенинг не нужен, так как соотношение цветных и черно-белых пикселей составляет 1:1. Соотношение цветных и черно-белых пикселей важно знать для дешифрирования, для фотограмметрических задач достаточно черно-белого изображения.
Часто цифровые камеры поставляются вместе с приемниками спутникового позиционирования или GPS/IMU-системами. Эксплуатация камер ADS 40/ADS 80 вообще невозможна без использования GPS/IMU. Раньше считалось, что необходимым условием использования данных GPS является дифференциальный режим измерений и наличие базовых станций, расположенных в 30–50 км от места проведения съемки. Однако установка базовых станций при съемке труднодоступных или удаленных районов требует существенных затрат. Методы обработки данных GPS на основе эфемерид спутников, доступных через несколько дней после съемки, становятся все более точными. Эти методы получили название PPP (Precise Point Positioning). Согласно отчету компании
NovAtel, Inc. [5], точность определения координат при использовании PPP в последних версиях программного обеспечения GrafNav приближается к точности дифференциальных методов и пригодна для ЦФС (табл. 5).
Таблица 5. Точность определения координат при использовании PPP
Методы точного позиционирования уже широко используются при обработке снимков камер ADS 40/ADS 80. Думаю, они найдут применение и для других камер.
Если вместе с приемником GPS на борту самолета установлена сиcтема IMU, то после обработки данных GPS/IMU можно получить элементы внешнего ориентирования для каждого снимка. При достаточной точности этих элементов из процесса обработки данных на ЦФС можно исключить уравнивание и использовать так называемое прямое геопозиционирование. Очень грубой оценкой требуемой точности системы IMU является угловой размер пикселя Δφ= 1/F, где F — фокусное расстояние камеры в пикселях. Для рассматриваемых цифровых камер эта величина приблизительно равна 0,006°. Производители систем IMU выпускают аппараты разного класса точности. Так, из приборов компании Applanix можно использовать не самые дорогие POS AVI серий 410 или 510.
Если на борту самолета дополнительно установлен лазерный сканер, который позволяет получать облако точек в полете, то фотограмметрическая обработка снимков еще больше упрощается, так как после постобработки сканерных данных для построения ортофотопланов уже будет в наличии модель рельефа местности. Для использования технологии лазерного сканирования необходимы GPS/IMU-системы класса не ниже (а иногда и выше), чем для цифровых камер.
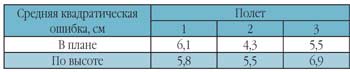
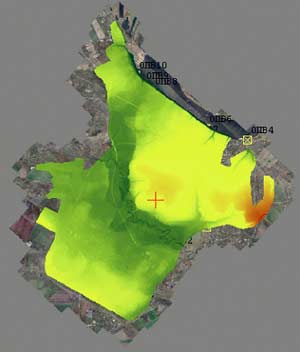
Технологии прямого геопозиционирования с помощью GPS/IMU-систем и получения рельефа местности с помощью лазерного сканирования все чаще применяются при реализации производственных проектов. Приведем пример из практики нашей компании (рис. 10): съемка с высоты 1200 м проводилась камерой UltraСam D (GSD = 9 см), общий размер блока составил 1010 снимков, для блока были подготовлены восемь контрольных планово-высотных точек и цифровая модель рельефа, сформированная по данным лазерного сканирования. При использовании прямого геопозиционирования точность по контрольным точкам составила 17 см, что позволило рассчитать ортофотопланы масштаба 1:2000 без уравнивания и стереообработки. Для части блока (294 снимка) требовалось создать ортофотоплан масштаба 1:500. Для этого в пределах указанной территории была выполнена аэротриангуляция, что позволило достичь точности 8 см.
Рис. 10. Прямое геопозиционирование
За рамками статьи остались вопросы, связанные с архивированием и хранением данных цифровой съемки. Если результаты сканирования снимка аналоговой камеры можно просто стереть (при необходимости снимок сканируется заново), то цифровые снимки следует хранить на оптических носителях, жестких дисках или стримерах. Мы не рассмотрели и экономические аспекты использования такого оборудования, как цифровые камеры, GPS/IMU-системы, лазерные сканеры. Безусловно, для различных проектов и работ их приобретение имеет разную экономическую привлекательность. Крупноформатные цифровые камеры позиционируются как оборудование, способное полностью заменить аналоговые камеры. Среднеформатные камеры больше подходят для маршрутной съемки или съемки небольших блоков. В ближайшие годы, надеюсь, произойдут дальнейшее улучшение характеристик цифрового оборудования, снижение его стоимости и повышение привлекательности для покупателей.
Список литературы 1. Madani M., Dorstel C., Heipke C., Jacobsen K. DMC practical experience and accuracy assessment // ISPRS Proceedings. — Istanbul, 2004. 2. . Jacobsen K. Geometric handling of large size digital airborne frame camera images // Optical 3D Measurement Techniques. — Zurich, 2007. — Vol. I. — Р. 164–171. 3. Райзман Ю.Г. Аэросъемочный фотограмметрический комплекс VisionMap A3 // VIII Междунар. научно-технич. конф. «От снимка к карте: цифровые фотограмметрические технологии». — Пореч (Хорватия), 2008. 4. Фильтр Байера. — http://ru.wikipedia.org/wiki. 5. Airborne multi-pass precise point positioning in GrafNav 8.10 // Waypoint Products Group, NovAtel, Inc., December 2007. — http://www.novatel.com/Documents/Waypoint/Reports/MultiPassReport.pdf.