Компьюлента: трёхмерный маятник Фуко спешит на помощь GPS
На сайте "Компьюлента", опубликована статья "Трёхмерный маятник Фуко спешит на помощь GPS" по материалам Управления перспективных исследований Министерства обороны США. В ней рассказывается о системе инерциальной навигации. Полностью с материалом можно ознакомиться по ссылке.
Низкая надёжность GPS в горах и лесах (и не только) не устраивает американских военных, требующих иной навигационной системы, столь же не зависящей от окружающей обстановки, как нынешние инерциальные гироскопы.
С апреля, когда появились первые намерения в этой сфере со стороны Управления перспективных исследований Министерства обороны США (DARPA), минуло всего полгода, а DARPA уже отчитывается о первых прототипах новых микроэлектромеханических (МЭМС) систем инерциальной навигации, готовых к внедрению и даже сейчас, на нынешнем технологическом уровне, по точности не уступающих военной версии GPS.
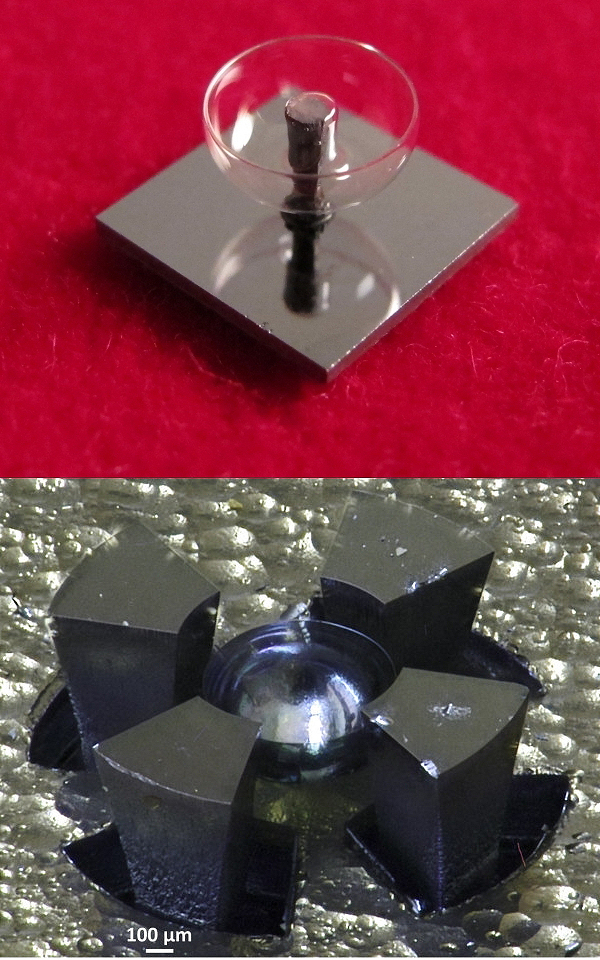
Прототипы трёхмерных маятников Фуко в исполнении Мичиганского университета (вверху) и Технологического института Джорджии (внизу) (здесь и ниже фото DARPA).
Современные гироскопы для инерциальных систем навигации весьма сложны и дороги: одно устройство такого рода, собираемое вручную, изготавливается около месяца и стоит до млн. В рамках проекта Microscale Rate Integrating Gyroscope («Интегрирование гироскопов на микроуровень», MRIG) DARPA нацеливается на реализацию программы Micro-Technology for Positioning, Navigation and Timing («Микротехнологии для позиционирования, навигации и точного измерения времени», Micro-PNT), сфокусированной на применении гироскопа с вибрирующей структурой из кварцевого или обычного стекла сверхнизкого расширения — вроде тех, что использовались в КА «Кассини–Гюйгенс».
При этом вместо традиционного для микроэлектромеханических устройств двумерного изготовления речь идёт о трёхмерной упаковке МЭМС, что позволяет сделать их более миниатюрными.
Принципиально такое устройство инерциальной навигации опирается на стандартный маятник Фуко, в котором плоскость колебаний слегка изменяется из-за вращения Земли. Однако вместо маятника в описываемых МЭМС-приборах инерциальный сенсор посылает вибрации по поверхности трёхмерных структур. Точность такой стоячей волны постоянно контролируется, и, как только инерциальный сенсор перемещается в пространстве в любом из трёх измерений, это немедленно отражается на колебаниях 3D-поверхности.
А это образец Калифорнийского университета в Ирвайне.
Среди использованных для решения такой задачи подходов DARPA особо выделило прототипы Мичиганского университета, Технологического института Джорджии и Калифорнийского университета в Ирвайне. Разработчики из первого вуза применили стеклянную структуру, полученную при помощи архаичной, казалось бы, технологии выдувания стекла. При этом дробление частоты для такого 3D-маятника составило всего 10 Гц (чем меньше дробление частоты, тем выше точность). Во втором прототипе также использовались стеклодувные технологии, но стекло было кварцевым, что позволило получить более однородную микроструктуру (при остывании кварцевое стекло испытывает меньшие размерные колебания). Кстати, если обычное стекло дуется при 800 ˚С, то кварцу нужно 1 700 ˚С, то есть речь идёт о значительно более сложной (хотя и потенциально более точной) технологии. Наконец, в третьем образце использовалось химическое парофазное осаждение, с помощью которого в микроуглублениях на выдувной поверхности из стекла были получены синтетические алмазы. Симметрия такого сенсора в перспективе обещает быть самой высокой.
Итак, вторая фаза проекта создания средств инерциальной навигации на базе МЭМС завершена, теперь DARPA планирует отточить технологию, сократив размер сенсоров с 20 до 10 мм³, а частоту дробления — с 10 до 5 Гц, что должно вдвое повысить точность новых средств навигации.