Современные технологии диагностики подводных переходов трубопроводов приборным комплексом на основе многолучевого эхолота
Гринь Г.А.
ООО Подводно-техническая фирма «Возрождение»
В системе обеспечения надёжности и безопасности трубопроводного транспорта наибольшую сложность представляют пересечения газопроводами и нефтепроводами рек, каналов, озёр и водохранилищ подводные переходы или дюкеры.
Подавляющее большинство подводных переходов построено траншейным способом непосредственно в руслах рек и в водоёмах. Несмотря на достигнутые успехи в прокладке дюкеров таким способом, самому методу присущи недостатки, которые снижают уровень долговременной надёжности подводных переходов.
Участки подводных переходов, по указанным причинам, являются постоянными зонами риска.
Аварии на подводных переходах наносят огромный экономический ущерб, а ликвидация аварий неизмеримо более трудоёмкий и долговременный процесс, чем на сухопутной линейной части.
Для безопасной работы подводных переходов трубопроводов необходимо применение самых современных технических средств на этапах изысканий для проектирования, строительства и последующей диагностики.
Руководящим документом при мониторинге подводных переходов ОАО «Газпром» на данный момент является РД 51-3-96 «Регламент по техническому обслуживанию подводных переходов магистральных газопроводов через водные преграды».
В спектр основных задач по диагностике технического состояния подводного перехода входят следующие этапы:
1. Выполнение подводной (батиметрической) съёмки акватории.
2. Обнаружение оголённых и провисающих участков трубопроводов и определение их линейных размеров.
3. Определение состояния балластировки трубопровода на оголённых и провисающих участках.
4. Поиск посторонних предметов на дне акватории подводного перехода.
5. Определение планово-высотного положения трубопроводов под слоем грунта в русловой части.
6. Водолазные работы с подводной теле-видео аппаратурой.
7. Топографическая съёмка береговой части с определением планово-высотного положения трубопроводов.
На предприятии ООО Подводно-техническая фирма «Возрождение» внедрён и успешно используется приборный комплекс для контроля строительства и мониторинга состояния подводных переходов, для объектов любой сложности и протяжённости. Состав приборного комплекса не является жёсткой замкнутой структурой, он представляет собой набор компонентов, решающих определённый перечень задач. Компоненты составляются исходя из методики обследования, особенностей объекта и сезона проведения работ.
Некоторые компоненты подобраны таким образом, чтобы производился взаимный контроль данных, полученных различными приборами и методами сбора информации.
Одним из наиболее важных этапов диагностики подводных переходов является съёмка подводной части акватории и обнаружение оголённых и провисающих участков трубопроводов.
Классически эта работа выполняется однолучевым промерным эхолотом, совместно с гидролокатором бокового обзора (ГБО).
Судно, двигаясь по запроектированным промерным галсам, с некоторой дискретностью описывает подводный рельеф.
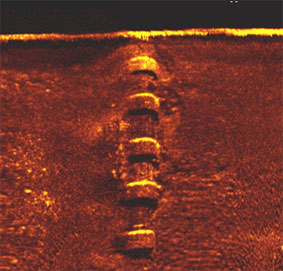
ГБО даёт представление о подводной ситуации, дополняя данные промеров акустическим изображением, позволяющим оценить размеры и формы обнаруженных объектов (рис.1)
Рис.1. Гидролокационное изображение размытого трубопровода.
Исходя из опыта работы по диагностике подводных трубопроводов на объектах различной сложности, необходимо сделать следующее заключение: промерные работы с использованием классической технологии не всегда эффективно решают задачу получения достаточной информации о состоянии подводного рельефа и ситуации.
Например, на подводных переходах с сильно расчленённым рельефом техногенного характера, применение однолучевого эхолота и гидролокатора бокового обзора малоэффективно в силу особенностей данного оборудования. Также эта технология малоэффективна на протяжённых объектах, требующих большой степени детализации, например при обследовании морских подводных трубопроводов.
Таким образом, однолучевые эхолоты, даже в комплексе с ГБО, недостаточно полно решают задачу детального обследования дна акваторий подводных переходов. Подходят для приближённого моделирования подводного рельефа и оценки ситуации.
Их целесообразно использовать:
При работе с малого плавсредства;
На участках с экстремально малыми (менее 2 м) глубинами;
На участках, не требующих 100-процентной площадной съёмки;
На участках с пологим подводным рельефом.
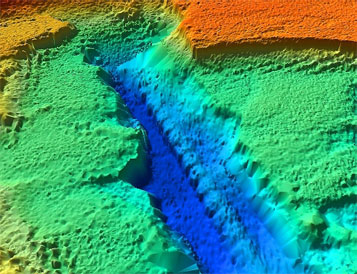
При работах с многолучевыми эхолотами обеспечивается площадная
(100-процентная) съёмка акватории с большой плотностью данных, сравнимых по объёму с результатами наземных съёмок цифровым лазерным сканером (рис.2). По сравнению с однолучевыми системами имеют большее преимущество на участках со сложным подводным рельефом и в некоторых случаях заменяют гидролокатор бокового обзора.
Рис.2. Фрагмент съёмки участка акватории подводного перехода многолучевым эхолотом.
Многолучевые эхолоты рекомендованы Международной гидрографической организацией для задач:
Контроля за строительством и эксплуатацией подводных трубопроводов и других подводных сооружений;
Картографирования акваторий портов, водных путей и судоходных каналов;
Выполнения детальной съёмки рельефа дна на акваториях, где производится подводное строительство или дноуглубление.
При диагностике подводных переходов многолучевые эхолоты целесообразно использовать:
На участках, требующих 100% площадной съёмки;
При больших объёмах промерных работ;
На участках со сложным подводным рельефом.
Приборный комплекс на основе многолучевого эхолота должен включать в себя набор датчиков и устройств, корректирующих работу системы, а также специализированное ПО для управления и контроля за сбором данных.
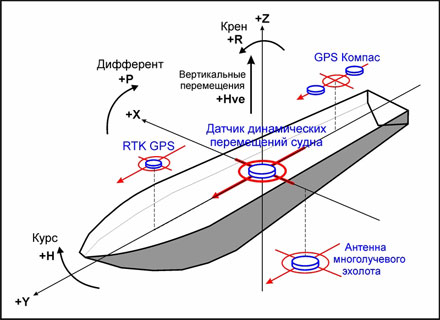
Расстояния (офсеты) между всеми ключевыми точками промерного судна - датчиком динамических перемещений и антеннами устройств, должны быть тщательно измерены и учтены в системе координат судна (рис. 3).
Рис.3. Геометрия осей судна и принципиальная схема расположения основных датчиков системы.
На предприятии ООО Подводно-техническая фирма «Возрождение» данный приборный комплекс установлен и успешно используется на малых промерных катерах (рис.4), которые легко транспортируются по автомобильным дорогам и могут быть применены на большом количестве подводных переходов в разных точках страны.
Тщательно выверенная схема расположения устройств системы позволяет уверенно проводить работы в условиях небольшого волнения, при высоте волны более 1 метра.
Рис.4. Малый промерный катер с установленным приборным комплексом.
Точное координирование промерного судна осуществляется в реальном времени с помощью геодезических GPS- приёмников, использующих технологию DGPS или RTK.
Опорная базовая станция, установленная на берегу находится на пункте с известными координатами и по радиоканалу транслирует дифференциальную коррекцию для приёмника, находящегося на судне.
При невозможности использования этой технологии в связи с большой (более 15-20 км) протяженностью подводного перехода может использоваться система дифференциального сервиса глобального действия.
Контроль планово-высотного положения трубопровода на подводных (русловых) участках подводного перехода выполняется несколькими методами, имеющими возможность взаимного контроля.
В качестве основного метода используется трассопоисковая система с генератором сигнала, подключаемым к трубопроводу.
На подводных переходах большой протяжённости требуется повышенная мощность генератора сигнала.
Трассопоисковая система, применяемая на русловых участках подводных переходов, в отличие от наземной, производящей измерения вертикальной составляющей в статике, должна собирать данные в режиме непрерывного движения, так как установлена на судне, двигающемся по съёмочным галсам, ориентированным поперёк трубопровода.
Окончательное вычисление планово-высотного положения оси трубопровода осуществляется в режиме пост-обработки.
Существует прямая зависимость точности определения положения трубопровода от глубины до его оси. В целях повышения достоверности измерений следует увеличивать количество съёмочных галсов, создавая избыточные измерения, дублировать измерения в разных частотных диапазонах и использовать независимый метод контроля.
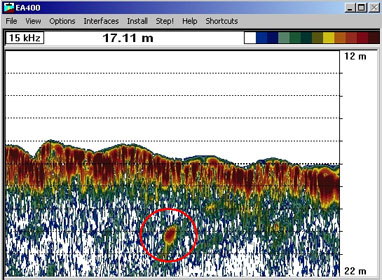
Независимым методом контроля данных электромагнитного трассоискателя на русловых участках является метод акустического профилирования. Он имеет свои недостатки, но на участках со средней и большой глубиной воды (10-20 м) и небольшим (1-3 м) заглублением трубопровода под поверхностью дна водоёма показал положительные результаты (рис.5).
Рис.5. Акустическое изображение замытого трубопровода на глубине 3 м.
К недостаткам акустического метода можно отнести уменьшение проникновения сигнала с ростом толщины грунта над трубопроводом, громоздкость аппаратуры, относительная сложность в настройках и управлении. Положительное качество возможность в режиме реального времени наблюдать величину слоя грунта над верхом замытого трубопровода.
В случае совпадения данных, полученных от двух независимых источников, положение трубопровода определяется уверенно.
Совместное использование этих методов позволяет уменьшить погрешности каждого метода в отдельности.